Unmanned Aerial Systems Optimization
Projects.PathPlanning History
Show minor edits - Show changes to markup
A more sustainable and intelligent approach is needed to address the important challenge of effective health monitoring of our nation's critical infrastructure [1]. Recent advances in computer vision and image processing techniques may hold the key to a robust, objective, monitoring and assessment pathway that will result in more efficient and rapid management of the spatially distributed levee systems and prioritization of resources. Having near real-time information on possible anomalies and weaknesses of a system is critical as it allows for better understanding and therefore modeling of these part-natural, part-engineered, interdependent human adaptive systems.
A more sustainable and intelligent approach is needed to address the important challenge of effective health monitoring of our nation's critical infrastructure [1]. Recent advances in computer vision and image processing techniques may hold the key to a robust, objective, monitoring and assessment pathway that will result in more efficient and rapid management of the spatially distributed levee systems and prioritization of resources. Having near real-time information on possible anomalies and weaknesses of a system is critical as it allows for better understanding and therefore modeling of these part-natural, part-engineered, interdependent human adaptive systems.
- View 3D Models
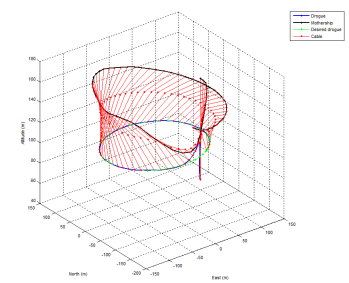
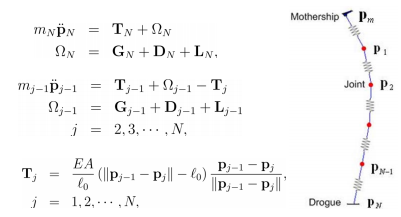
- Sun, L., Castagno, J., Hedengren, J. D., and Beard, R. W., Parameter Estimation for Towed Cable Systems Using Moving Horizon Estimation, IEEE Transactions on Aerospace and Electronic Systems, Vol. 51, No. 2, April 2015. Preprint Δ, Article
- Sun, L., Hedengren, J. D., and Beard, R. W., Optimal Trajectory Generation using Model Predictive Control for Aerially Towed Cable Systems, Journal of Guidance, Control, and Dynamics, Vol. 37, Issue 2, pp. 525-539, 2014. Preprint Δ, Article
References
[2] CA Department of Water Resources (DWR) (2008) http://www.water.ca.gov/levees/evaluation/
[2] CA Department of Water Resources (DWR) (2008) http://www.water.ca.gov/levees/evaluation/
[3] Martin, R.A., Blackburn, L., Pulsipher, J., Franke, K., Hedengren, J.D., Potential Benefits of Combining Anomaly Detection with View Planning for UAV Infrastructure Modeling, Remote Sensing, 9(5), 434, 2017, doi:10.3390/rs9050434. Article (Open Access)
[4] Sun, L., Castagno, J., Hedengren, J. D., and Beard, R. W., Parameter Estimation for Towed Cable Systems Using Moving Horizon Estimation, IEEE Transactions on Aerospace and Electronic Systems, Vol. 51, No. 2, April 2015. Article
[5] Sun, L., Hedengren, J. D., and Beard, R. W., Optimal Trajectory Generation using Model Predictive Control for Aerially Towed Cable Systems, Journal of Guidance, Control, and Dynamics, Vol. 37, Issue 2, pp. 525-539, 2014. Article
<iframe width="560" height="315" src="http://www.youtube.com/embed/7G48RZExZiw?rel=0" frameborder="0" allowfullscreen></iframe>
<iframe width="560" height="315" src="https://www.youtube.com/embed/7G48RZExZiw?rel=0" frameborder="0" allowfullscreen></iframe>
Download MATLAB Source Files
Download MATLAB Source Files
<iframe width="560" height="315" src="http://www.youtube.com/embed/McbQ6UfxQ0A" frameborder="0" allowfullscreen></iframe>
<iframe width="560" height="315" src="https://www.youtube.com/embed/McbQ6UfxQ0A" frameborder="0" allowfullscreen></iframe>
References
- Sun, L., Castagno, J., Hedengren, J. D., and Beard, R. W., Parameter Estimation for Towed Cable Systems Using Moving Horizon Estimation, IEEE Transactions on Aerospace and Electronic Systems, Vol. 51, No. 2, April 2015. Preprint Δ, Article
- Sun, L., Hedengren, J. D., and Beard, R. W., Optimal Trajectory Generation using Model Predictive Control for Aerially Towed Cable Systems, Journal of Guidance, Control, and Dynamics, Vol. 37, Issue 2, pp. 525-539, 2014. Preprint Δ, Article
Presentation on UAS Optimization
References
[1] Report Card for America’s Infrastructure, http://www.infrastructurereportcard.org/, American Society of Civil Engineers, accessed January 2013.
[2] CA Department of Water Resources (DWR) (2008) http://www.water.ca.gov/levees/evaluation/
<iframe width="560" height="315" src="http://www.youtube.com/embed/wEttSxlc9NI" frameborder="0" allowfullscreen></iframe>
<iframe width="560" height="315" src="http://www.youtube.com/embed/McbQ6UfxQ0A" frameborder="0" allowfullscreen></iframe>
UAV Motion Trajectory Planning
Fill in information here
UAV Motion Trajectory Planning
Fill in information here
