Unmanned Aerial Systems Optimization
Infrastructure Monitoring with Unmanned Aerial Systems
A more sustainable and intelligent approach is needed to address the important challenge of effective health monitoring of our nation's critical infrastructure [1]. Recent advances in computer vision and image processing techniques may hold the key to a robust, objective, monitoring and assessment pathway that will result in more efficient and rapid management of the spatially distributed levee systems and prioritization of resources. Having near real-time information on possible anomalies and weaknesses of a system is critical as it allows for better understanding and therefore modeling of these part-natural, part-engineered, interdependent human adaptive systems.
Our goal is to improve the sustainability of the flood protection systems in the U.S. by introducing technological improvements in large-scale levee and embankment dam health monitoring through automation and advances in computer vision, robotics, and geotechnical engineering [2].
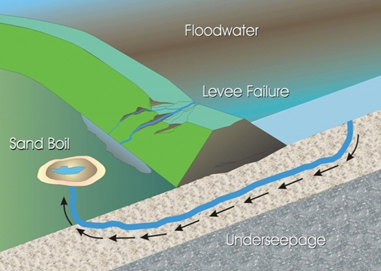
Our work in particular is driven by the hypothesis that early detection of possible anomalies and weaknesses of a civil infrastructure system is crucial to maintain the long term system integrity and to minimize possible adverse impacts to the environment. We will provide these health monitoring tools with a research plan that enables autonomous image collection with aerial and ground robots, reconstruction of infrastructure geometry and recognition of material, detection and localization of possible anomalies, and visualization of these weaknesses in an augmented reality environment to improve management. This project, through a synergistic collaboration, has the potential to transform health monitoring of earth structures that would not be possible otherwise.
Trajectory Planning of Unmanned Aerial Systems
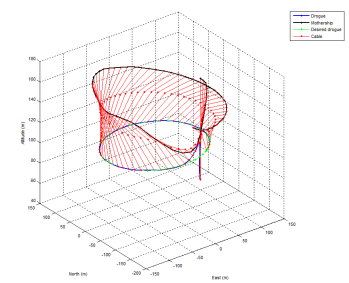
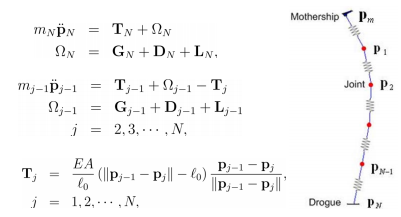
Unmanned aerial systems may consist of multiple agents with coordinated actions. Modeling and control of the system leads to increasingly complex systems. It is desirable for each agent in the system to reach individual objectives so that the overall objective is accomplished. This problem may be posed as an optimization problem and solved with a receding horizon controller. Solving the problems with APMonitor demonstrates that complex dynamic systems can perform coordinated and optimal actions to achieve a shared objective. This work is performed in collaboration with the BYU MAGICC Lab.
Multiple Agent Control Applications
There are a number of issues associated with multiple agent control that are of interest to other control disciplines as well. For example, in chemical plants and refineries, sophisticated large-scale controllers may be more difficult to maintain than multiple agent-based controllers. Splitting the controller into multiple parts improves the ability to explain controller action, reduces development costs, and allows sub-sets to be revamped without changing the other agents.
Presentation on UAS Optimization
References
[1] Report Card for America’s Infrastructure, http://www.infrastructurereportcard.org/, American Society of Civil Engineers, accessed January 2013.
[2] CA Department of Water Resources (DWR) (2008) http://www.water.ca.gov/levees/evaluation/
[3] Martin, R.A., Blackburn, L., Pulsipher, J., Franke, K., Hedengren, J.D., Potential Benefits of Combining Anomaly Detection with View Planning for UAV Infrastructure Modeling, Remote Sensing, 9(5), 434, 2017, doi:10.3390/rs9050434. Article (Open Access)
[4] Sun, L., Castagno, J., Hedengren, J. D., and Beard, R. W., Parameter Estimation for Towed Cable Systems Using Moving Horizon Estimation, IEEE Transactions on Aerospace and Electronic Systems, Vol. 51, No. 2, April 2015. Article
[5] Sun, L., Hedengren, J. D., and Beard, R. W., Optimal Trajectory Generation using Model Predictive Control for Aerially Towed Cable Systems, Journal of Guidance, Control, and Dynamics, Vol. 37, Issue 2, pp. 525-539, 2014. Article
